|
|
aHR0cDovL2ZyZWVzaGlwLmNvLmtyItem specifics Packaging Details - Unit Type:piece
- Package Weight:0.2kg (0.44lb.)
- Package Size:10cm x 10cm x 10cm (3.94in x 3.94in x 3.94in)
Packaging Details - Unit Type:piece
- Package Weight:0.2kg (0.44lb.)
- Package Size:10cm x 10cm x 10cm (3.94in x 3.94in x 3.94in)
t; Tarot Brushless Gimbal Camera mount Gyro ZYX22 for Gopro 3 Aerial Photography Multicopter FPV
Descriptions:
- Suitable for GOPRO brushless Camera mount TL68A08 (SKU:25824) brushless gimbal or other similar products, used in entertainment, film and television photography, advertising model aircraft photography and so on many fields
Features:
- Support the GOPRO Hero3 video aux output
- Support the power supply voltage reverse connection protection and voltage compensation
- Support for motor drive side short circuit protection
- Support initial pitch angle
- Support the sensitivity parameters adjustment and the software 3 d posture display
- Support the rocker rate model and location
- Support the receiver: conventional receiver S - BUS receiver, DSM2 DSMJ/DSM receiver
- Support remote control equipment: PPM/PCM / 2.4 G
- Operating voltage: 7.4 V ~ 14.8 V DC (recommended 12 V, three lithium electricity
- Work current :200 ma - 500 ma (related to the power supply voltage and motor power
- Working environment temperature: 15-65C
- Processor: dual high-speed 32-bit ARM core processor
- Sensors: three MEMS gyroscope rotor and rotor MEMS accelerometer
- Maximum angular rate: 2000 deg/ SEC
- Maximum acceleration: 16 g
- Control frequency: 2000 hz
- Motor drive frequency: 20 KHZ (noiseless smooth drive)
- Accuracy:0.1 deg
- Control range: - 45 ~ 45 (roll), - 135 ~ 90 (pitch)
- Gesture decoding algorithm: dedicated to brushless motor driven yuntai decoupling EKF algorithm
- Applicable filming equipment: GOPRO Hero3
Specification:
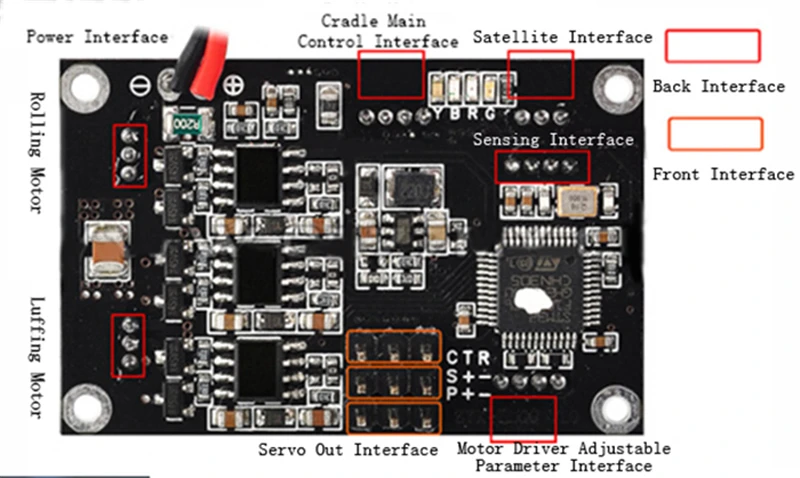
- Gimbal tuning parameter interface: a serial port module connected to the computer through the USB, used in gimbal main controller tuning parameters and status monitoring
- Motor drive tuning parameter interface: a serial port module connected to the computer through the USB, is used to adjust the number of motor driver module,power voltage and current monitoring
Receiver steering gear output interface
- R: common receiver roll inputs
- T: common receiver pitch input
- C: common receiver model input (rocker arm Angle mode or speed)
- S: S - BUS receiver channel or photo input channel
- P: take pictures steering gear output (infrared photo module can be attached)
- + 5 v output, - : power supply
- Satellite interface: used to connect to the satellite receiver
- Roll motor and pitch interface: used to connect the motor
- Sensor interface: used to connect to sensor
Package including:
- ZYX3 rotor gyroscope quad ZYX07 x 1
- GOPRO two axis gyro sensor x1
- GOPRO gimbal two axis gyroscope main controllerx 1
- 4.5x 4.5 MM insulation spacer x 4
- 2x3 mm round head cross screw x8
    --> -->
|
|
|
|
|
















 배송기간
배송기간







































