|
|
     aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 통신 방법: 다른
- 브랜드 이름: FaseLase
- 원산지: 중국
Velodyne LiDAR VLP-16 16 와이어 3d LiDAR, 새로운 브랜드, 95% NEW, 완전히 기능, 완벽한 액세서리, 데이터 상자 및 전원 공급 장치. 테스트 비디오는 배달 전에 전송되며 기능은 정상입니다! 새로운 것이 필요한 경우 아래 링크를 클릭하십시오.
https://www.해외.com/item/1005004646718839.html?spm=5261.ProductManageOnline.0.0.3fd92ddbqkxlKa

벨로다인 라이다 벅
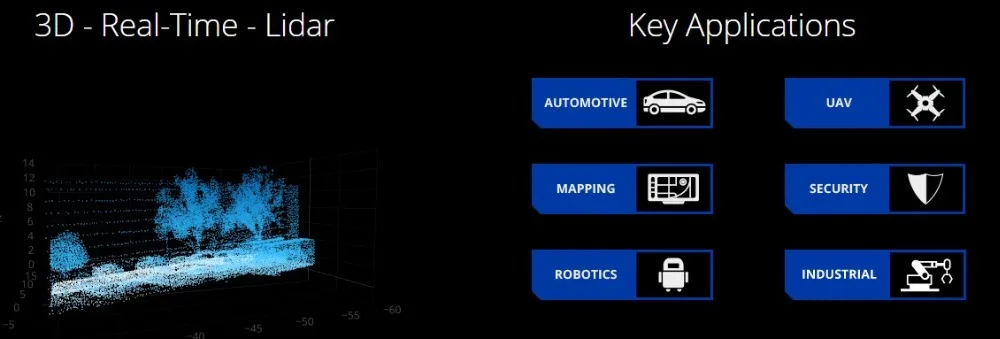
Velodyne의 새로운 VLP-16 센서는 Velodyne의 3D LiDAR 제품군 중 가장 작고 최신이며 가장 진보된 제품입니다. 비슷한 가격의 센서보다 훨씬 비용 효과적이며 대량 생산을 염두에두고 개발 된이 센서는 LiDAR에서 Velodyne의 획기적인 주요 기능을 유지합니다: 실시간, 360 °, 3D 거리 및 보정 된 반사율 측정.
3D-실시간-LiDAR
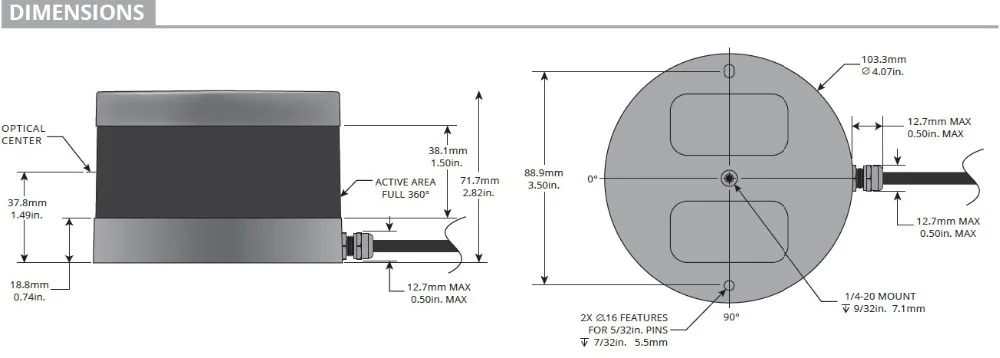
VLP-16 범위는 100m, 센서의 낮은 전력 소비 (~ 8W), 경량 (830g), 컴팩트 한 공간 (~ Ø103mm x 72mm), 듀얼 리턴 기능을 통해 UAV 및 기타 모바일 애플리케이션에 이상적입니다. Velodyne의 LiDAR 퍽은 16 채널, ~ 300,000 포인트/초, 360 ° 를 지원합니다.
수평 시야 및 30 ° 수직 시야, +/- 15 ° 위아래로. Velodyne LiDAR 퍽은 눈에 띄는 회전 부품이 없으므로 까다로운 환경에서 높은 탄력성을 갖습니다 (정격 IP67).
주요 기능
콤팩트 폼 팩터를 사용한 100 m 범위가장 큰 설치 기반을 갖춘 입증된 905 nm 기술최고급 뷰 필드동급 최고의 정확도 및 교정 강도동급 최고의 전력 및 온도 범위센서 대 센서 간섭 완화 기능옵션, 향상된 단거리 감지매력적인 볼륨 가격의 다양한 기능
사양:
센서:
? 보정 된 반사경으로 비행 거리 측정 시간
? 16 채널
? 최대 100 미터의 측정 범위
? 정확도: +/- 3 cm (일반)
? 이중 반품
? 시야 (수직): 30 ° (+ 15 ° ~-15 °)
? 각도 해상도 (수직): 2 °
? 시야 (수평/방위각): 360 °
? 각도 해상도 (수평/방위각): 0.1 ° - 0.4 °
? 회전 속도: 5 - 20Hz
? 간편한 모니터링 및 구성을위한 통합 웹 서버
레이저:
? 1 등급-눈 안전
? 905 nm 파장
기계/전기/작동:
? 전력 소비: 8 W (일반)
? 작동 전압: 9 - 32 VDC (인터페이스 상자 및 조절 전원 공급 장치 포함)
? 무게: 830 그램 (케이블 없음)
? 크기: 직경 103mm x 높이 72mm
? 충격: 500 m/sec² 진폭, 11 msec 지속 시간
? 진동: 5Hz ~ 2000Hz, 3G rms
? 환경 보호: IP67
? 작동 온도-10 ° ~ + 60 ° C
? 보관 온도-40 ° ~ + 105 ° C
출력:
? 최대 0.3 백만 포인트/초
? 100 Mbps 이더넷 연결
? UDP 패킷 포함
-거리
-보정 된 반사
-회전 각도
-동기화 된 타임 스탬프 (μs 해상도)
? GPS 수신기에서 $ GPRMC NMEA 문장 (GPS는 포함되지 않음)
실제 지구에서 제공 한 데이터.
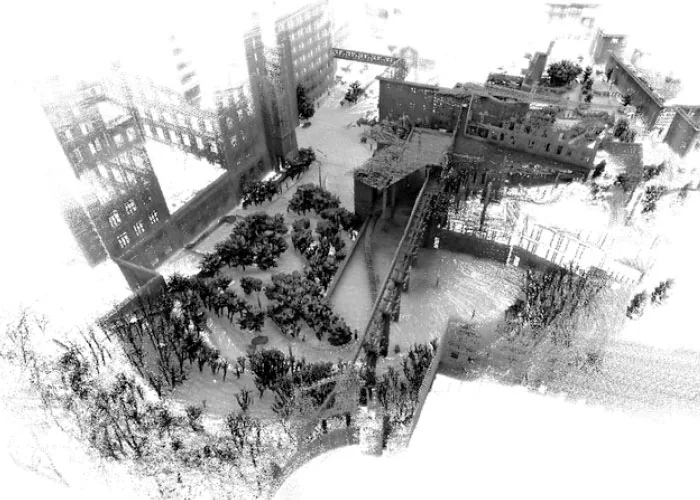
XactSense에서 제공 한 데이터.
피닉스 항공 시스템에 의해 제공된 자료.
차량 현지화
단일 VLP16 (Velodyne 16) 은 IMU/Wheel-Encoder 및 이전 3D 맵 (포즈 그래프 SLAM을 사용하여 빌드) 과 함께 맵 기반 현지화에 사용됩니다. 저비용 현지화를 향한 한 걸음.
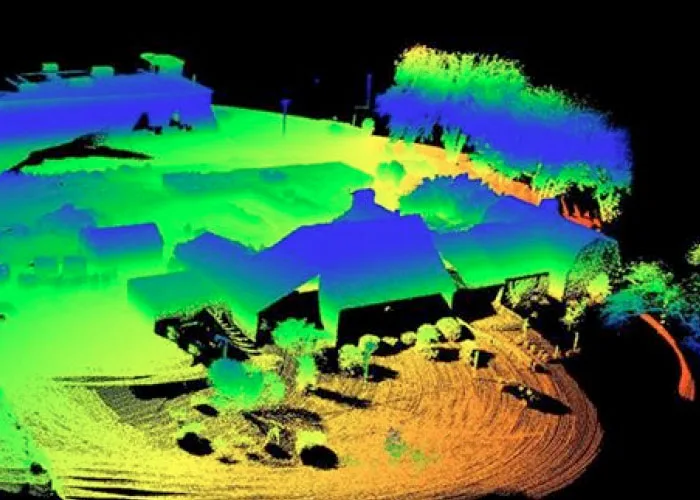
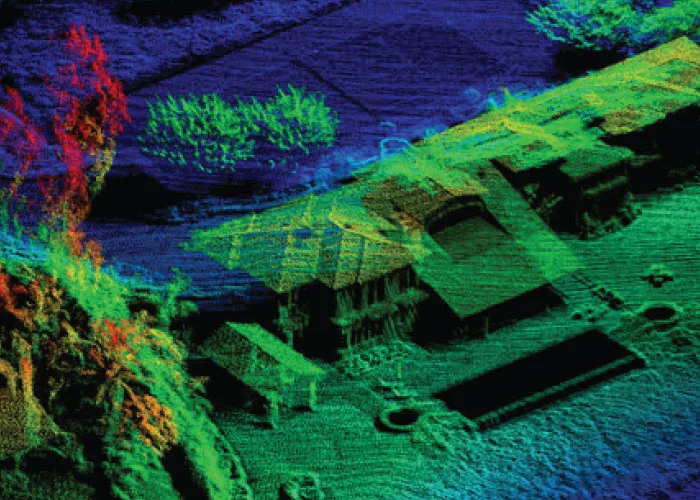
UAV 레이더 매핑 시스템
이 비디오는 피닉스 항공 AL3-16 라이더 매핑 시스템의 개요입니다. 이 비디오에서는 DJI S1000 이 사용되며 데모를 위해 열린 구덩이 위로 날아갔습니다. 여러분은 Lidar가 어떻게 초목 아래의 점을 집어내는지 볼 수 있을 것입니다. vs 사진 측량법은 나무 덮개만 나타낼 것입니다.
UAV 공중 레이저 스캔
Devourer X8 무거운 리프트 멀티 로터 UAV의 브러시리스 짐벌에 장착 된 Velodyne Lidar `Puck` 의 첫 번째 실험.
|
|
|
|
|
















 배송기간
배송기간







































