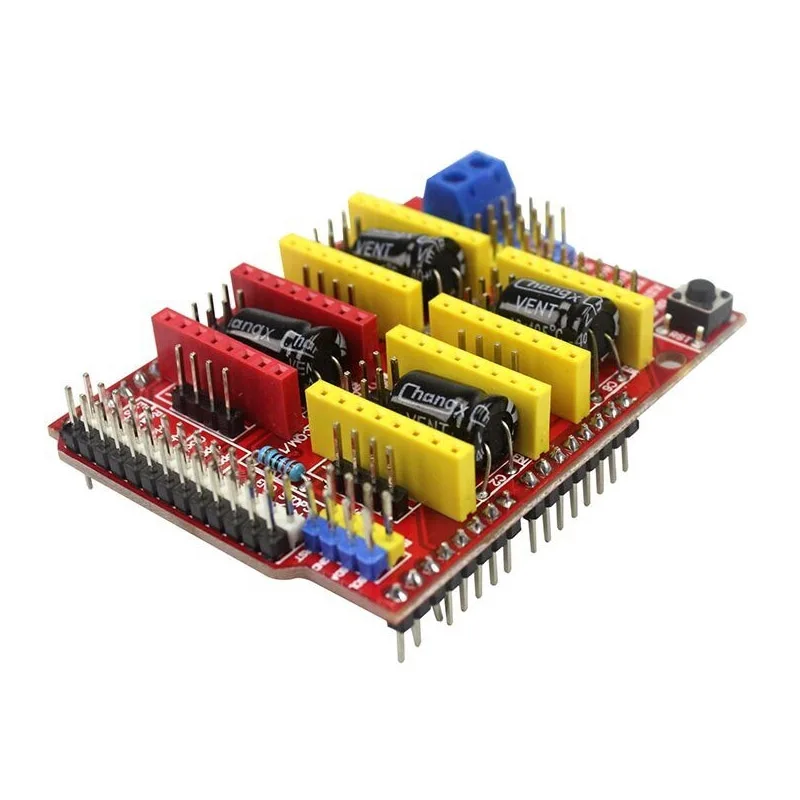
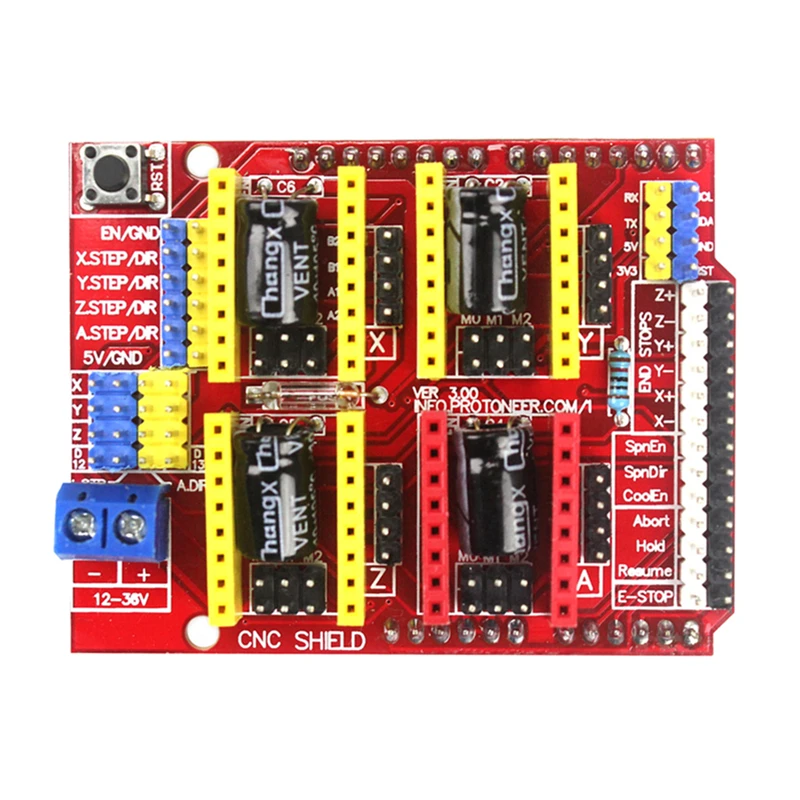
UNO for Arduino -------------------------- 확장 보드
8 --------------------- EN (스테퍼 모터 드라이버 활성화, 활성 낮은)
7 -------------------- Z.DIR (Z 축 방향 제어)
6 -------------------- Y.DIR (Y 축 방향 제어)
5 -------------------- X.DIR (X 축 방향 제어)
4 ---------------------- Z.STEP (Z 축 스테퍼 제어)
3 -------------------- Y. 단계 (Y 축 스테퍼 제어)
2 -------------------- X. 단계 (X 축 스테퍼 제어)
//뒤에 오는 것은 간단한 댄서 모터 통제 절차입니다,
# 정의 EN 8 / /스테퍼 모터 활성화, 활성 낮은
# Define X_DIR 5/X 축 스테퍼 모터 방향 제어
# Define Y_DIR 6 / / y 축 스테퍼 모터 방향 제어
# Define Z_DIR 7/z 축 스테퍼 모터 방향 제어
# Define X_STP 2/x 축 스테퍼 제어
# Define Y_STP 3 / / y 축 스테퍼 제어
# Define Z_STP 4 / / z 축 스테퍼 제어
/기능: 단계. 기능: 댄서 모터의 방향, 단계의 수를 통제하기 위하여.
//매개 변수: dir 방향 제어, dirPin 해당 스테퍼 모터 DIR 핀, stepperPin 해당 스테퍼 모터 "단계" 핀, 반환 값의 단계의 단계 수.
무효 단계 (boolean dir, 바이트 dirPin, 바이트 stepperPin, int 단계)
DigitalWrite (dirPin, dir);
지연 (50);
(Int i = 0; i <단계; i + +)
DigitalWrite (높은 stepperPin);
DelayMicroseconds (800);
DigitalWrite (stepperPin, LOW);
DelayMicroseconds (800);
(실험 현상:스테핑 모터는 1 개의 무릎을 반전하고 1 초 동안 일시 중지하며 1 개의 무릎을 통과하여 순환합니다.그 때 플러깅 있는 A4988 모듈, 않도록주의하십시오 삽입.
스테핑 모터 배선 방법은 다음과 같습니다.2A, 2B 그룹 (빨강, 녹색), 1A, 1B 그룹 (파란색, 노란색) 변경 방향, 변경 한 그룹의 위치 2A, 2B.) 와 교환




















 배송기간
배송기간







































