A, 제품 소개
확장 보드는 조각 기계, 3d 프린터 드라이버 확장 보드, 스테퍼 모토 r의 드라이브 모듈의 총 오프로드 슬롯으로 사용할 수 있습니다. Moto sako는 moto r 드라이브 모듈을 포함하지 않습니다. 상점에 있어야합니다. 도로는 moto r에 들어가지 않습니다. 그리고 각 스텝 모터는 두 개의 개별 음성만 필요합니다. 즉, 6 개의 개별 모터는 매우 우수한 관리 스텝 모터가 될 수 있으며, 매우 편리하고, 기존 스테퍼 모터와 작별합니다.
두, 입의 서신에 대한 UNOAnd 모듈 소개
스테퍼 모터 핀의 기본 제어 요구 사항, 다른 핀은 조각 기계에 있고, 또는 프린터를 사용할 때, 여기서 우리는 위와 같이 상세하게 만들지 않습니다.
UNO ---------------------- 확장 보드
8 ------------------------ (엔스테퍼 모터 드라이버, 끝을 활성화하는 낮은 수준의 효과)
7 및 Z.DIR (ZAxis 방향 제어)
6 및 Y.DIR (YAxis 방향 제어)
5 및 X.DIR (XAxis 방향 제어)
4 전도 Z. 단계 (ZAxis 단계 제어)
3 전도 Y. 단계 (YAxis 단계 제어)
//다음은 간단한 스테퍼 모터 제어 절차입니다.
# EN 8/스테핑 모터를 끝까지 정의하십시오.
# X_DIR 5/Xaxis 스테퍼 모터 방향 제어 정의
# Define Y_DIR 6 // yaxis 스테퍼 모터 방향 제어
# Define Z_DIR 7 // zaxis 스테퍼 모터 방향 제어
# X_STP 2/xaxis 단계 제어 정의
# 정의 Y_STP 3 // yaxis 단계 제어
# Define Z_STP 4 // zaxis 스텝 컨트롤
*
//기능: 단계 기능: 단계별 스테퍼 모터의 방향을 제어합니다.
//매개 변수: 디디렉션 컨트롤 더핀, 스테퍼 모터 더핀에 해당하는 스테퍼 핀, 스테퍼 모터 스테핑에 해당하는 스텝 수
//반환 값 없음
*/
무효 단계 (Boolean dir byte dirPin,, byte stepperPin int steps,)
{{
(DigitalWrite dirPin, dir);
지연 (50);
(Int i = 0; I < steps; i ++) {
DigitalWrite (스테퍼핀, 높음);
지연 마이크로 초 (800);
DigitalWrite (스테퍼핀, 낮음);
지연 마이크로 초 (800);
}
}
무효 (설정) {// 스테퍼 동력판에서 출력으로 설정됩니다.
(PinMode X_DIR, 출력); 핀모드 (X_STP, 출력);
(PinMode Y_DIR, 출력); 핀모드 (Y_STP, 출력);
(PinMode Z_DIR, 출력); 핀모드 (Z_STP, 출력);
(핀 모드 EN, 출력);
(DigitalWrite EN, LOW);
}
무효 (루프) {
(Step false, X_DIR, X_STP, 200); // XShaft 모터 reversalOneRing, 원 200 단계
(Step false, Y_DIR, Y_STP, 200); // yShaft 모터 reversalOneRing, 원 200 단계
(Step false, Z_DIR, Z_STP, 200); // zShaft 모터 reversalOneRing, 원 200 단계
지연 (1000);
(단계 true, X_DIR, X_STP, 200); // XShaft 모터 포워더링, 원 200 단계
(단계 true, Y_DIR, Y_STP, 200); // yShaft 모터 포워더링, 원 200 단계
(단계 true, Z_DIR, Z_STP, 200); // zShaft 모터 포워더링, 원 200 단계
지연 (1000);
}
실험 현상: 스테퍼 모터의 회전, 일시 중지, 다음 이야기 원, 그래서 사이클.
Thea4988 에서 모듈이 연결되지 않았을 때 스텝 모터 연결 모드는 다음과 같습니다.
그룹 (빨강, 녹색),1A, 1 b의 경우 그룹 (파란색, 노랑) 의 방향을 변경하고 한 그룹의 위치를 변경할 수 있습니다. 예를 들어 2a, and2BExchange.
제품 설명
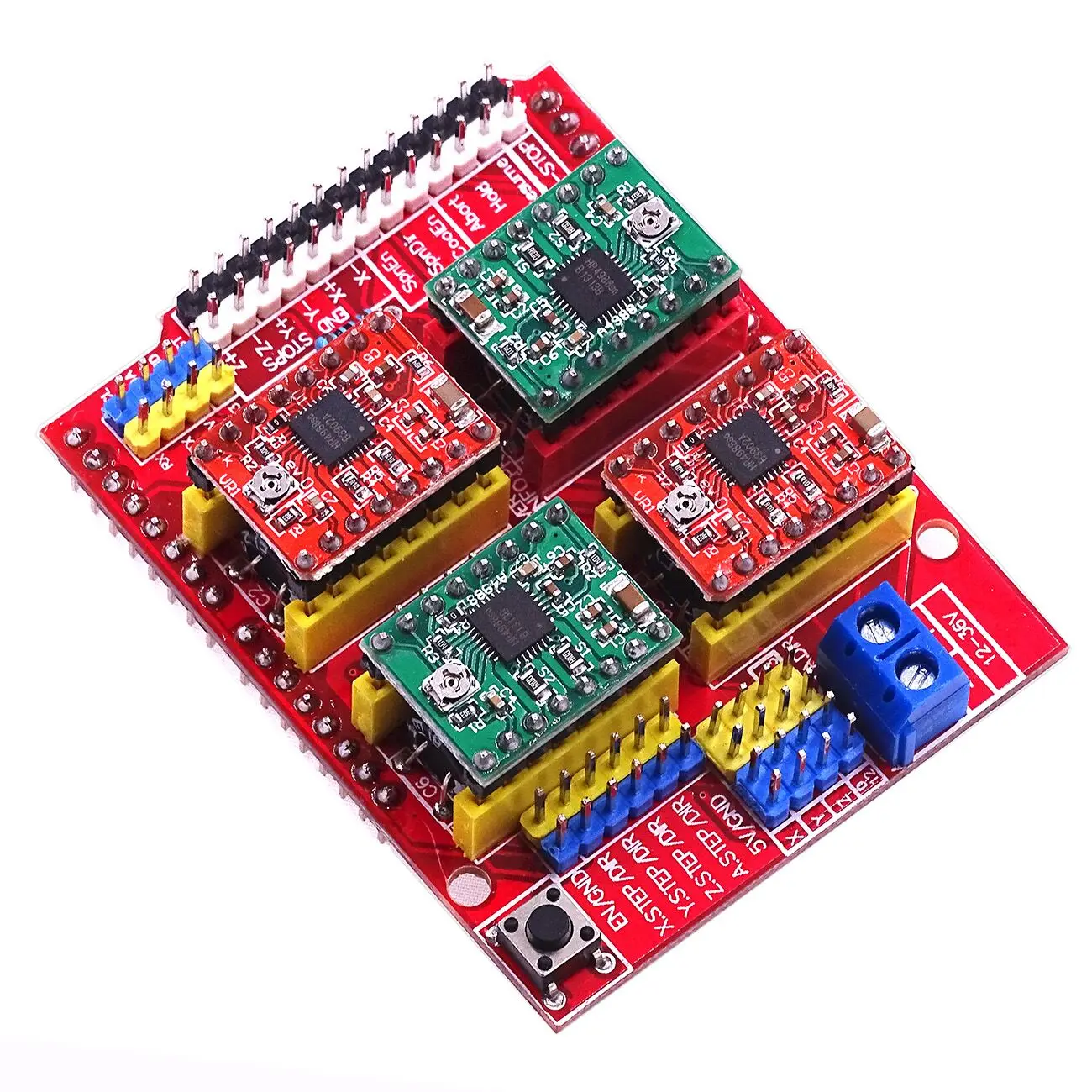
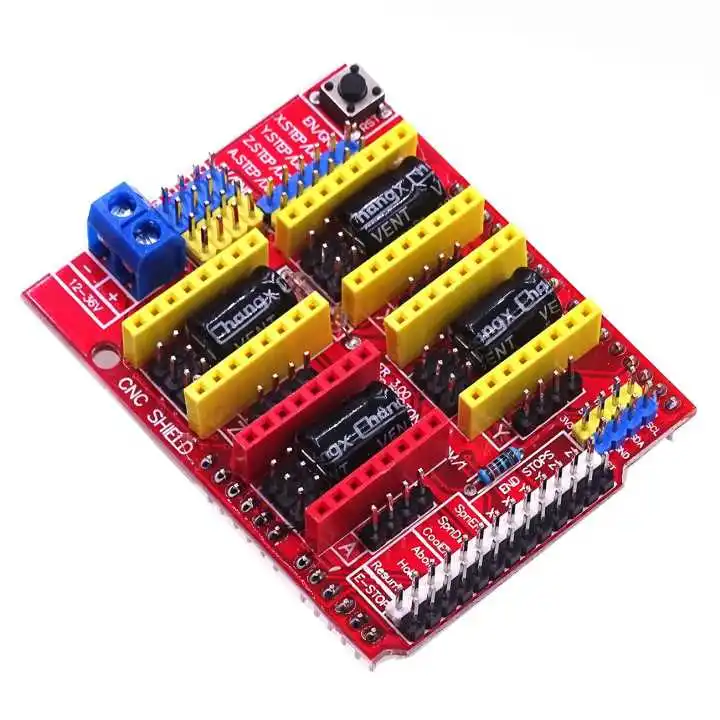
CNC 실드 보드:
최신 CNC 방패 버전 3
0.9 호환. GRBL (G-코드 명령을 스테퍼 37 신호로 바꾸는 uno에서 실행되는 오픈 소스 펌웨어)
PWM 스핀들 및 방향 핀
4 축 지원 (X, Y, Z, A-Can 복제 X, Y Z, 또는 핀 D12 및 D13 을 사용하여 맞춤형 펌웨어로 전체 4 축 수행)
각 축에 대해 2 x 엔드 스톱 (총 6 개)
냉각수 활성화
탈착식 A4988 또는 DRV8825 호환 스테퍼 드라이버 사용
스테퍼를 위한 마이크로 스테핑을 설정하는 점퍼. (DRV8825 와 같은 일부 드라이버는 최대 1/32 마이크로 스테핑을 할 수 있습니다)
컴팩트 한 디자인.
스테퍼 모터는 핀 몰 렉스 커넥터와 연결하거나 4 개를 제자리에 납땜할 수 있습니다.
12-36v dc에서 실행됩니다. (현재 DRV8825 드라이버 만 최대 36v 를 처리 할 수 있으므로 전원을 공급할 때 작동 전압을 고려하십시오.)
조립되지 않은 키트이며 기본 납땜 기술이 필요합니다.




















 배송기간
배송기간







































