|
|
     aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 브랜드 이름: Waveshare
- 데모 보드 유형: 라즈베리 파이 2B
- 증명서: 세륨
- 근원: CN (정품)
- 모델 번호: NEO-M8T GNSS TIMING HAT
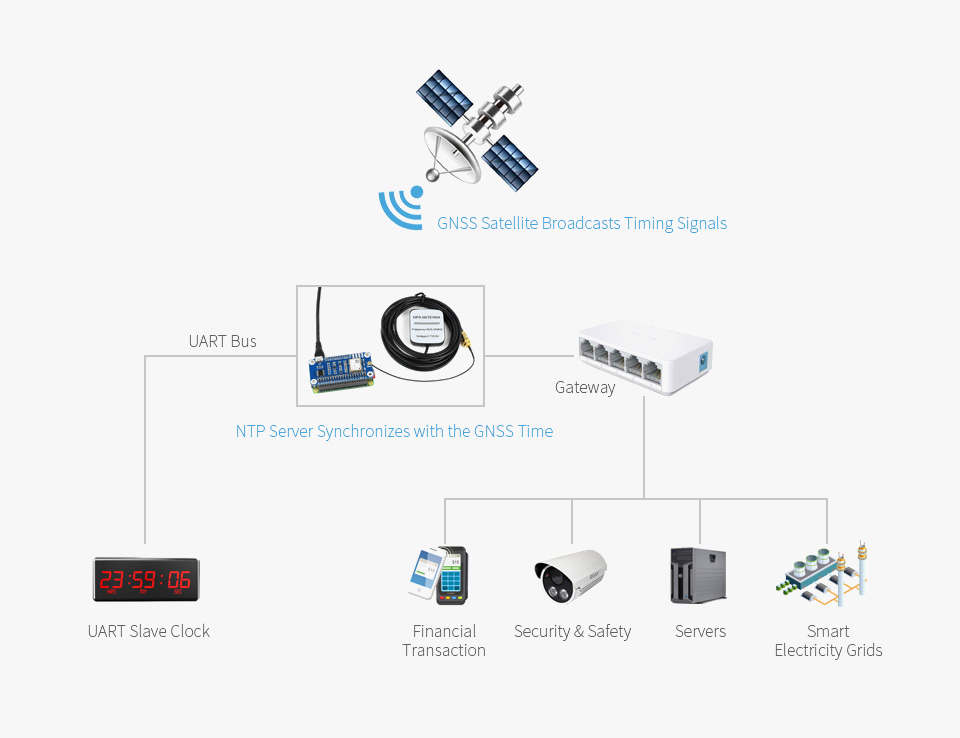
NEO-M8T GNSS 타이밍 HAT, 멀티 별자리 수신기 지원, 단일 위성 타이밍 기능
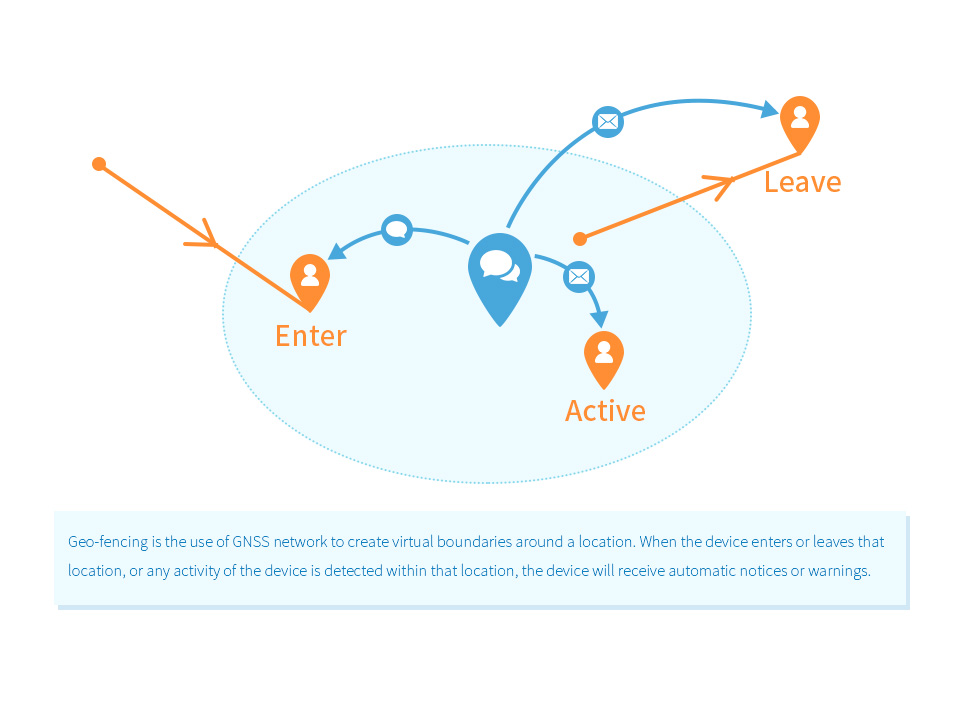
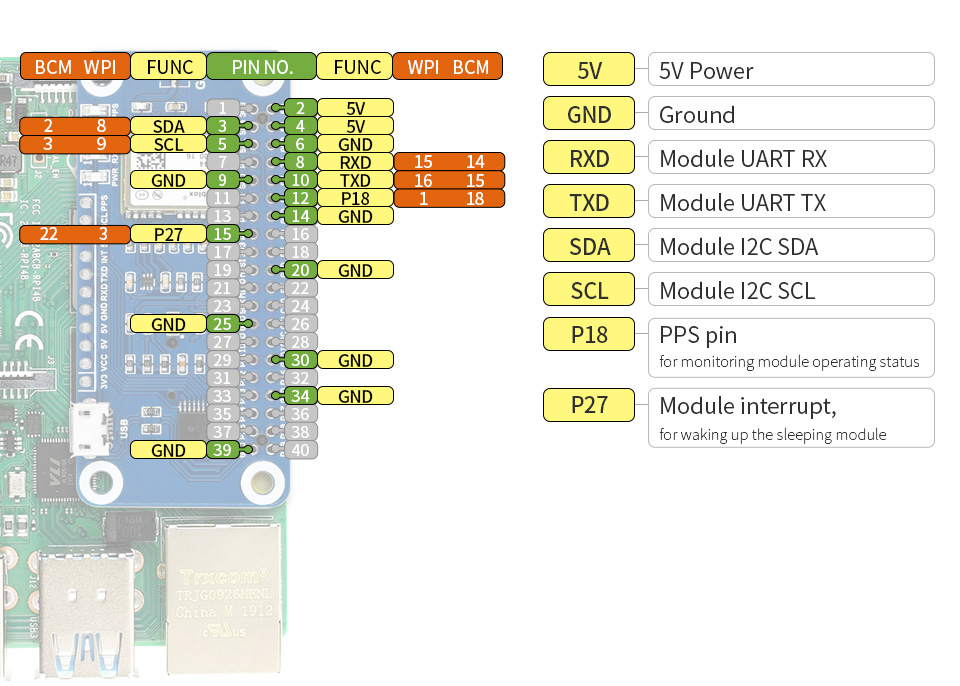
NEO-M8T GNSS 타이밍 모자 라즈베리파이 NEO-M8T 기반 GNSS 모듈, 단일 위성 타이밍 기능 사소한 표류, 낮은 전력 소비, 스푸핑 방지 및 잼 방지에 탁월한 기능으로 정확하고 빠른 포지셔닝 이것은라즈베리 파이 GNSS HAT기반으로NEO-M8T다중 별자리 수신기 지원 및 정확한 단일 위성 타이밍 기능. 그것은 최대 3 GNSS (GPS, Beidou, Galileo, GLONASS) 및 sbass, QZSS, IMES 및 D-GPS 같은 증강 시스템의 동시 수신을 지원합니다. 경미한 표류, 저전력 소비, 스푸핑 방지 및 잼 방지 기능으로 정확하고 빠른 포지셔닝 기능이 있습니다. 단순히 파이에 부착하여 라즈베리 파이에 GNSS 기능을 가능하게하는 것이 매우 쉽습니다. 특징 눈에 정확한 타이밍 기능, 하나의 위성으로도 높은 가용성 아날로그 및 디지털 간섭 완화 기능을 갖춘 높은 동적 범위 라디오, 무선 통신 장비의 애플리케이션 지원 다중 별자리 수신기 지원, GPS, Beidou, Galileo 및 glonass에서 최대 3 유형의 GNSS 위성 시스템의 동시 수신, 여전히 낮은 전력 소비 유지 Sbai, QZSS, IMES, D-GPS 포함한 증강 시스템 지원, 서비스 위치의 포지셔닝 성능 향상 A-GNSS (보조 GNSS) 지원, 전력을 올릴 때 첫 포지셔닝 시간을 줄여 수집 감도 향상 특징-167dBm 탐색 감도 및 스푸핑 방지 및 잼 방지를위한 뛰어난 기능, 지오 펜싱 지원 U-Center 지원, 모듈 구성 쉬운 방법 표준 라즈베리 파이 40 핀 GPIO 확장 헤더, 라즈베리 파이 시리즈 보드 지원, Jetson Nano Arduino/STM32 와 같은 호스트 보드와 연결을 위해 모듈의 UART 및 I2C 인터페이스를 분리합니다. 전송 범위: 4800 ~ 921600bps (기본적으로 9600bps) DDC (I2C 호환) 인터페이스 지원: 최대 400KHz (최대) 온보드 배터리 홀더, ML1220 충전식 셀 지원, ephemeris 정보 및 핫 스타트 유지 모듈 작동 상태를 표시하는 4x led 개발 리소스 및 설명서 제공 (라즈베리 파이/젯슨 나노/아두이노/STM32 예제)
명세 GNSS 명세 | NEO-M8T | GPS 및 GLONASS | GPS | GLONASS | BeiDou | 갈릴레오 | 주파수 | 72 채널 u-blox M8 엔진
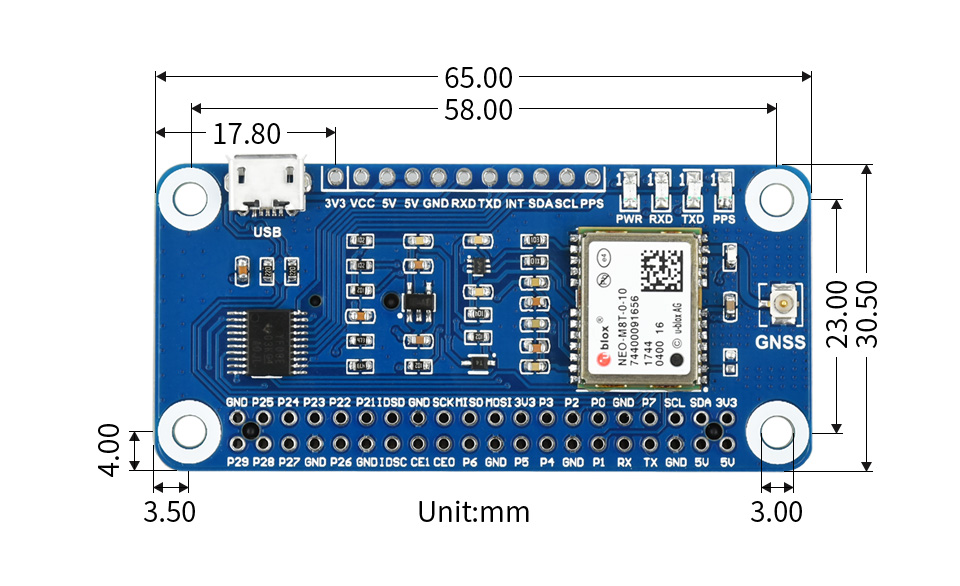
GPS L1C/A, sbass L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1, Galileo E1B/C | 수평 위치 정확도 | 자율 | 2.5m CEP | 2.5m CEP | 4.0m CEP | 3.0m CEP | - | SBAS | 2.0m CEP | 2.0m CEP | - | - | - | Max 항법 갱신 비율 | 4Hz | 10Hz | 10Hz | 10Hz | 10Hz | 시간에 첫 수정 | 콜드 시작 | 25s | 29s | 30s | 34s | 45s | 뜨거운 시작 | 1s | 1s | 1s | 1s | 1s | 지원 시작 | 2s | 2s | 2s | 3s | 7s | 감도 | 추적 및 탐색 | -167 dBm | -166 dBm | -166 dBm | -159 dBm | -159 dBm | 지원 수집 | -157 dBm | -157 dBm | -151 dBm | -146 dBm | -142 dBm | 다시 수집 | -160 dBm | -160 dBm | -156 dBm | -156 dBm | -153 dBm | 콜드 시작 | -148 dBm | -148 dBm | -145 dBm | -143 dBm | -138 dBm | 뜨거운 시작 | -160 dBm | -160 dBm | -156 dBm | -155 dBm | -151 dBm | 속도 정확도 | 0.05 메터/초 | 0.05 메터/초 | 0.1 메터/초 | 0.1 메터/초 | 0.1 메터/초 | 헤딩 정확도 | 0.3 학위 | 0.3 학위 | 0.4 학위 | 0.5 학위 | 0.5 학위 | PPS 정확도 | 맑은 하늘 | ≤ 20ns | 실내 | ≤ 500ns | 지터 | ± 11ns | PPS 주파수 | 0.25Hz…10MHz (구성 가능) | 연산 제한 | 가속 (최대): 4g | 고도 (최대): 50000m | 속도 (최대): 500 메터/초 | 다른 명세 | 통신 인터페이스 | USB, UART (4800 ~ 921600bps, 9600bps, 기본적으로), I2C (최대 400KHz) | 업데이트 속도 | 1Hz (기본값), 10Hz (최대) | 프로토콜 | NMEA 0183 버전 4.0 (V2.3 또는 V4.1 선택 가능), UBX, RTCM 2.3 | 전원 | 5V | 현재 | <45mA @ 5V (연속 모드) | 모듈 전류 | 32mA @ 3V (연속 모드) | 작동 온도 | -40 ℃ ~ 85 ℃ | 차원 | 65mm × 30.5mm |
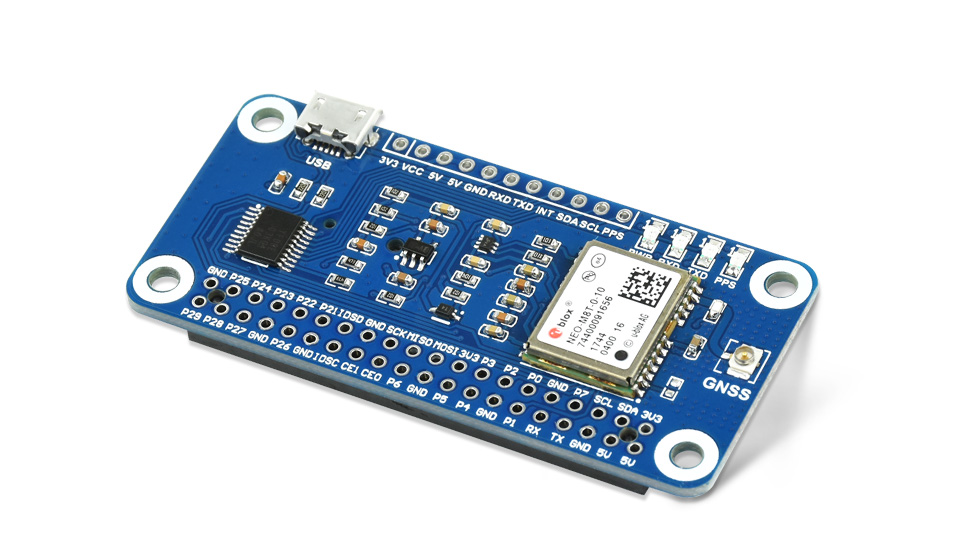
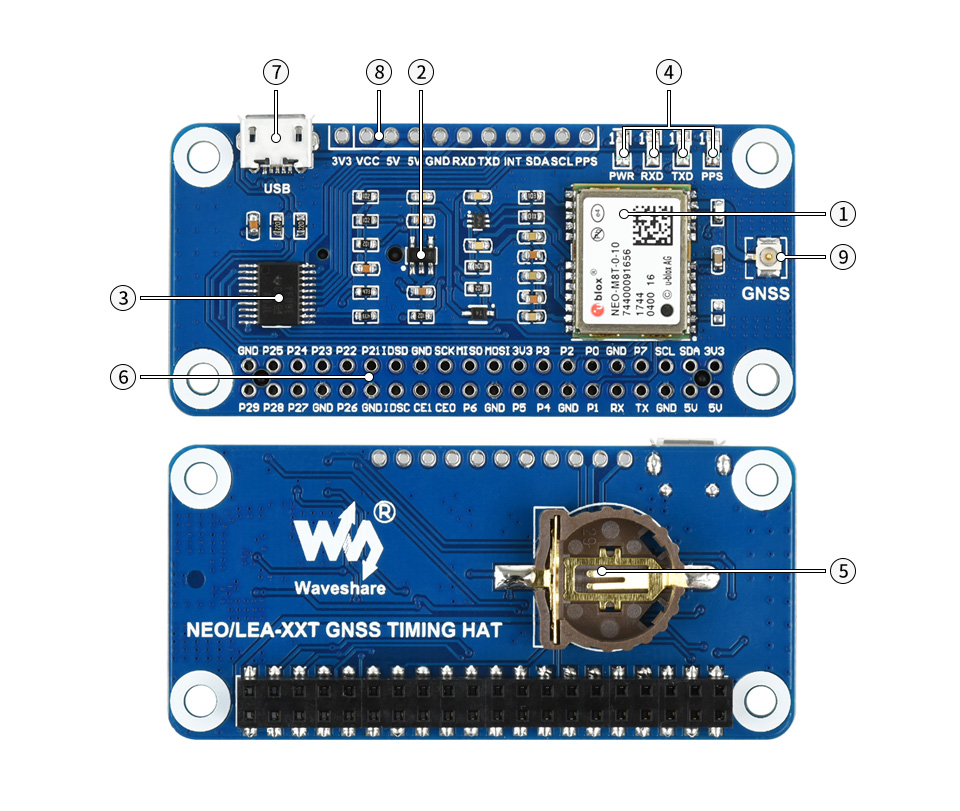
표준 라즈베리 파이 40 핀 GPIO 라즈베리 파이 시리즈 보드 Jetson nano와 호환 단일 위성 타이밍 및 동기화 하나의 위성으로도 높은 무결성, 정확한 타이밍 기능, 높은 가용성 비용 효율적, 고정밀, 쉬운 구현 다중 별자리 수신기 지원 최대 3 가지 유형의 GNSS 위성 시스템의 동시 수신, 여전히 낮은 전력 소비 유지 GPS, Beidou, Galileo 및 GLONASS 지원 보강 시스템 지원 증대 시스템은 포지셔닝 및 내비게이션의 정확성, 무결성, 신뢰성 및 가용성 향상을 목표로합니다. Sbai, QZSS, IMES, D-GPS 포함한 증강 시스템 지원 Geo 검술 지원 특징-167dBm 탐색 감도, 스푸핑 방지 및 재밍 방지를위한 뛰어난 기능 소프트웨어 U-센터 지원 모듈을 구성하는 쉬운 방법 신청 선단 관리, 자산 추적, 금융 거래, 스마트 전기 그리드, 보안 시스템, 산업용 PDA, GIS 앱 등에 이상적입니다. 무엇을 보드 NEO-M8T 모듈 RT9193-33전원 칩 TXS0108EPWR전압 번역기 상태 표시기
RXD/TXD: UART TX/RX 표시기
PPS: GPS 상태 표시기
PWR: 전원 표시기 배터리 홀더
Ephemeris 정보 및 핫 스타트 보존을 위한 ML1220 충전식 셀 지원
라즈베리 파이 GPIO 헤더
라즈베리 파이와 연결 용 USB 포트 UART, I2C 인터페이스
다른 mcus와 연결용 GNSS 안테나 커넥터
* 다른 제품의 리소스는 다를 수 있으므로 wiki 페이지에서 실제로 제공된 리소스를 확인하십시오.
패키지 내용
무게:0.131 kg NEO-M8T GNSS 모자 GPS 외장 안테나 (B) x1 USB-A Micro-B 케이블 RPi 나사 팩 (2 개) x1 2x20PIN 여성 헤더 x1
1  2 3 4 5
|
|
|
|
|























 배송기간
배송기간