|
|
   aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 브랜드 이름: Lizvawy
- 데모 보드 유형: 팔
- 증명서: 세륨
- 근원: CN (정품)
- 모델 번호: Robot Arm for Pi (for Europe)
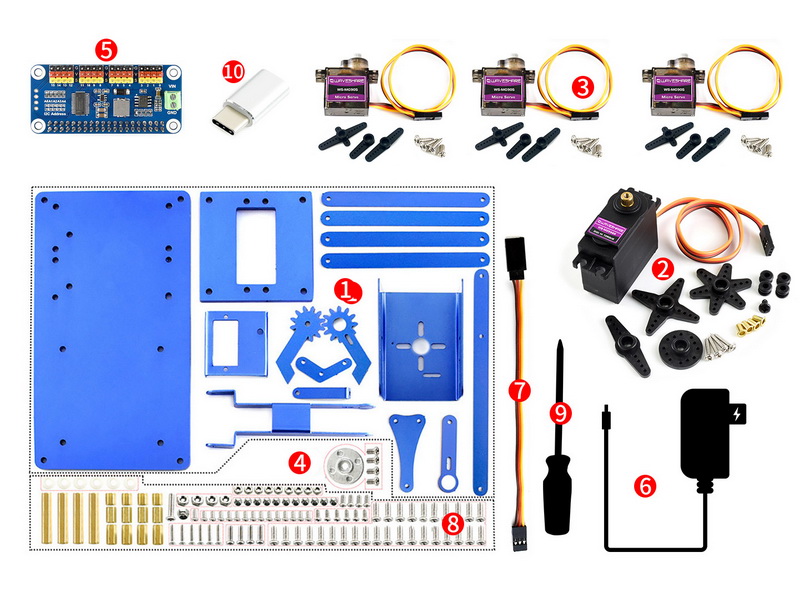
(참고: 미국 표준 어댑터는 기본적으로 패키지로 전송됩니다. EU 전원 어댑터로 변경하려면 주문에 메시지를 남겨주세요).설명 라즈베리 파이, 블루투스, 와이파이 원격 제어용 4-DOF 금속 로봇 암 키트개요이 4-DOF 금속 로봇 암으로 라즈베리 파이를 장착하고 인공 지능형 로봇의 세계를 탐험하기 시작하십시오. 이 스타터 로봇 암 키트에는 서보 드라이버 모자, 금속 기계식 암 구조 및 4x 메탈 기어 서보가 포함됩니다. 라즈베리 파이와 함께 사용하면 블루투스 또는 와이파이 연결을 통해 스마트 폰으로 팔을 쉽게 제어 할 수 있습니다. 서보 드라이버서보 드라이버 모자 채택: 표준 라즈베리 파이 40 핀 GPIO 확장 헤더, 라즈베리 파이 시리즈 보드 지원, Jetson Nano I2C 제어, 2 핀 만 사용 최대 16 채널 서보/PWM 출력, 각 채널에 대해 12 비트 해상도 (4096 스케일) 최대 3A 출력 전류 5V 레귤레이터 통합, VIN 터미널을 통해 배터리로 전원 공급 가능 표준 서보 인터페이스, SG90, MG90S, MG996R 등과 같은 일반적인 사용 서보를 지원합니다. 예약 된 I2C 제어 핀, 다른 제어 보드와 함께 작동 가능 개발 리소스 및 매뉴얼 제공 (블루투스/와이파이 원격 제어와 같은 파이썬의 예)
로봇 팔 구조4-DOF, 대형 솔리드베이스, 금속 기계식 그래퍼 전체 알루미늄 합금 본체, 샌드 블라스팅 산화 표면, 강하고 내구성 영리한 기계 구조 및 장착 디자인, 제어하기 쉽고 구조 용이 4x 메탈 기어 서보 (1x MG996R, 3x MG90S) 장착, 큰 토크력, 부드러운 이동
데모
차원   
참고: 라즈베리 파이는 포함되어 있지 않습니다.패키지 내용 무게:0.474 kg 금속 팔 부분 x1 MG996R 서보 x1 MG90S 서보 x3 MG996R 서보 휠 x1 서보 드라이버 모자 x1 옵션전원 어댑터 x1 서보 연장 와이어 150mm x1 나사 x1 드라이버 2PCS x1 어댑터 마이크로 B USB-C
|
|
|
|
|
















 배송기간
배송기간







































