설명: Stm32f407 로봇 제어 보드 ROS 스마트 자동차 메인 컨트롤 라즈베리 파이 제트슨 나노에 대한 4WD 레이더 장애물 회피
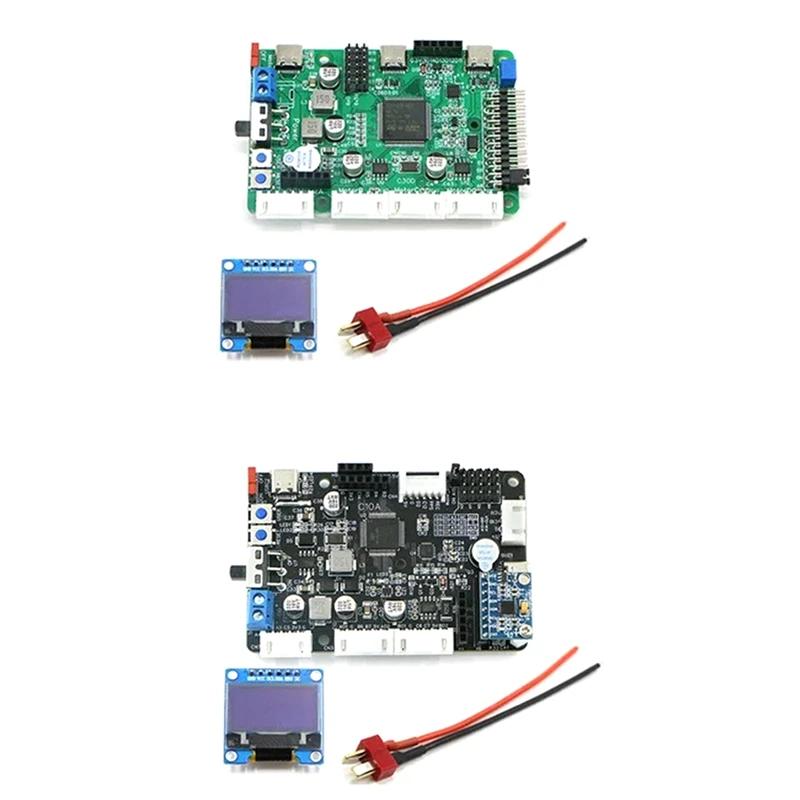
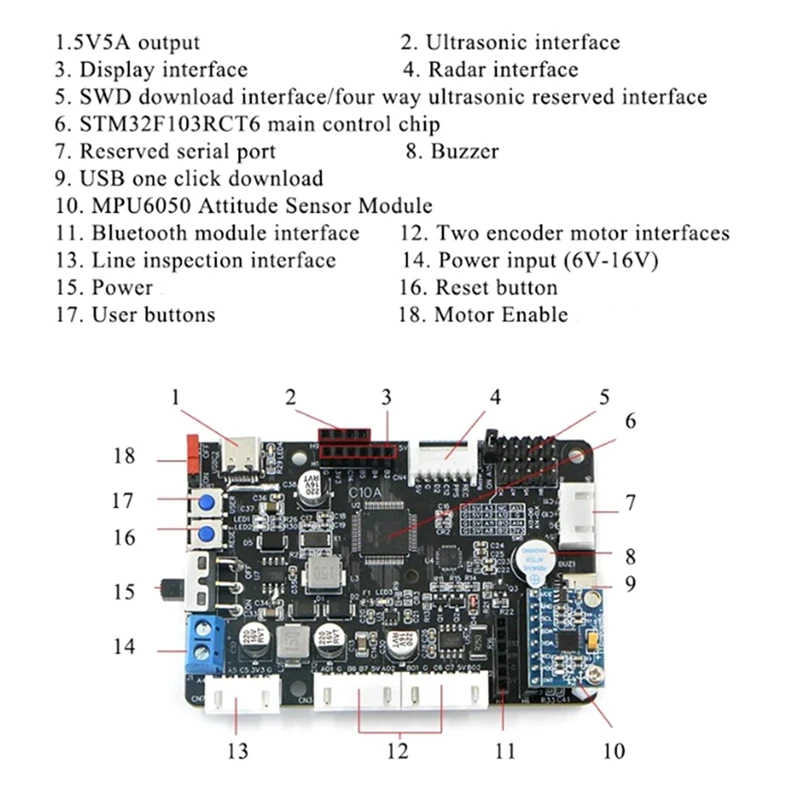
B01 스마트 카 메인 컨트롤 (2WD) 자세한 설명. B01 마더 보드는 지능형 차량 및 ROS 시나리오를 기반으로 설계되었으며 FOR Ackerman, 차동 및 트랙과 같은 다양한 섀시를 제어 할 수 있습니다. 해당 코드 및 자습서를 제공합니다.
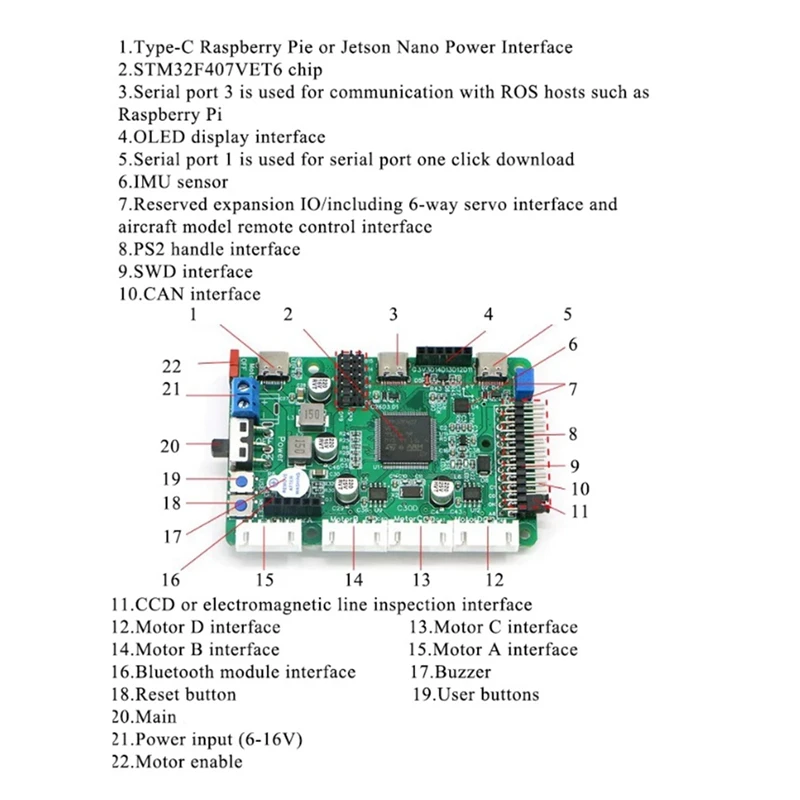
마더 보드는 직렬 포트를 통해 외부 세계와 통신 할 수 있으며 Raspberry Pi 또는 Jetson Nano와 같은 보드에 외부 전원 공급 장치를위한 5V5A 인터페이스를 제공합니다. 코드와 회로도는 모두 오픈 소스입니다.
B02 ROS 하단 메인 컨트롤 (4WD) 마더보드 상세 설명. B02 는 ROS 교육 로봇의 메인 컨트롤입니다. ROS 응용 프로그램 시나리오 설계를 기반으로 FOR Ackerman, 차동 장치, Mecanum 휠, 크롤러 등 다양한 섀시를 제어 할 수 있습니다. 모두 해당 코드와 자습서를 제공합니다.
마더 보드는 직렬 포트 또는 CAN을 통해 외부 세계와 통신 할 수 있으며 라즈베리 파이 또는 Jetson Nano 및 기타 보드에 대한 외부 전원 공급 장치 용 5V5A 인터페이스를 제공합니다. 코드와 회로도는 모두 오픈 소스입니다.
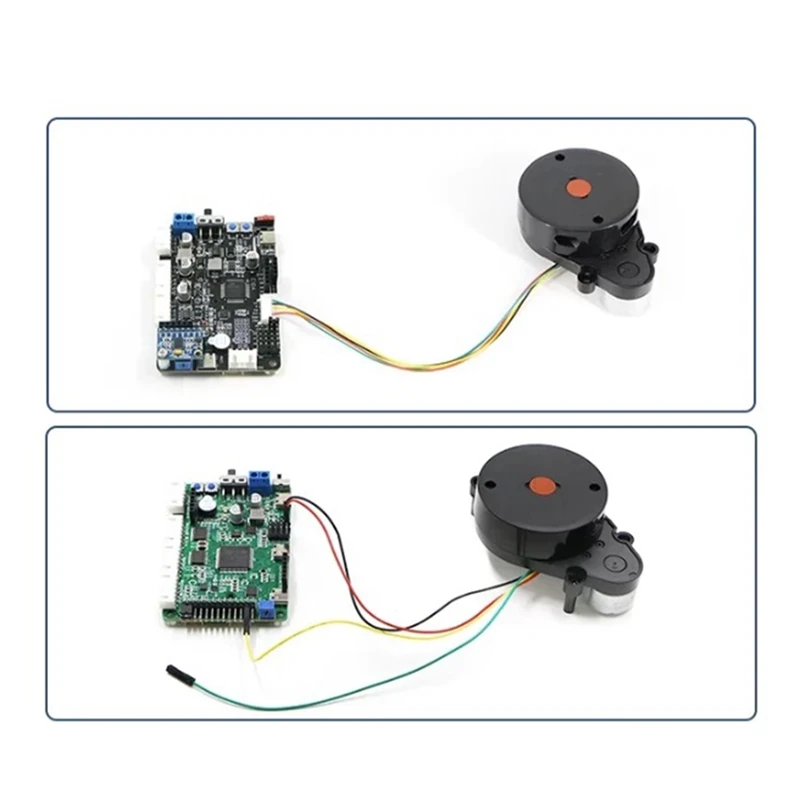
LiDAR와의 직접 연결을 지원합니다. Lidar 데이터를 직접 읽고 사용할 수 있으며 ARM 보드 없이도 레이더 장애물 회피 및 추적을 수행 할 수 있습니다
선형 CCD 라인 검사 및 전자기 라인 검사 지원, 예약 라인 검사 인터페이스, 선형 CCD 및 전자기 라인 검사의 두 가지 라인 검사 방법 지원, 라인 검사 센서의 기본 매뉴얼 제공
드라이브: 4WD / 2WD
소재: ABS
색상: 표시된 대로
패키지 내용물
1 x 남성 케이블
1 x 회로 기판
1 x 디스플레이
위의 패키지 내용만, 다른 제품은 포함되지 않습니다.
참고: 빛의 반사 및 다른 디스플레이로 인해 그림의 항목 색상이 실제와 약간 다를 수 있습니다. 측정 허용 오차는 +/- 1-3cm 입니다.



























 배송기간
배송기간